

自律走行型草刈り機の研究開発に至った経緯
「自律走行型草刈り機(以下、草刈り機)」なる機械の実用検証が現在、江戸川沿い堤防上の工事現場(R5三郷・吉川河川維持工事)で実施されている。
どこか大手の農機具メーカーあたりがやっているのかなと思いきや、金杉建設株式会社(本社:春日部市)を幹事とするコンソーシアム(株式会社アクティブ・ソリューション、株式会社創和、ARAV ※ARAVは今年度はメンバーから外れている)が実施主体となっているのを知って、少々驚いた。
なぜなら、中小企業である地域建設会社が、国の資金的な支援(PRISMプロジェクト)を受け、研究開発を行うというのは、けっこうレアな出来事だと思われたからだ。
昨年ぐらいから言われ始めた「インフラDX」的な試みだと言えるが、金杉建設はなぜ、草刈り機を自らの手で開発しようと考えたのか。草刈り機の誕生によって、現場作業のなにがどう変わるのか。取材してきた。


藤沼 修さん 金杉建設株式会社 工事部次長

島村 明さん 株式会社アクティブ・ソリューション 代表取締役

西尾 貴至さん 株式会社創和 代表取締役

松本 真之介さん 金杉建設株式会社 工事部
人手不足の草刈り作業を自動化したい
草刈り機に関する研究開発の発端は、2018年ごろにさかのぼる。当時の金杉建設では、いわゆるPRISM採択プロジェクトとして、別のコンソーシアムを組み、3Dを活用した締固めに関する研究開発を行っていた。その研究開発が一段落した後、次の研究開発テーマをどうするかが話し合われた。そこで浮上したのが、草刈り作業の自動化による生産性の向上だった。
「堤防の草刈りは、金杉建設として何十年も請け負ってきています。草刈り自体は単純な作業ですが、夏場の作業になるので、かなり過酷な作業です。作業員も高齢化しており、人手不足の懸念もあります。この草刈り作業を自動化することができれば、生産性を向上できるのではないかと考えました」。プロジェクトの実質的なリーダーである金杉建設の藤沼修さんはこう振り返る。
単純だが、過酷で危険な作業
この点、草刈り現場の監理技術者を務める金杉建設の松本真之介さんは「ウチが担当する草刈り現場は延長20kmほどあるので、作業員の進捗管理が大変です。作業員の事故にも気をつけなければなりません。マシンが傾斜で滑って作業員が転落し、マシンに轢かれて死亡するといった事故は、全国で毎年数件起きています」と指摘する。
つまるところ、草刈り作業は、単純だが、過酷で危険な作業ということらしい。付け加えれば、江戸川の堤防上は、ほぼほぼ無人のイメージがあるが、実際のところ、歩行者や自転車といった通行者が意外と多く、通行者が現場に侵入するリスクはそこそこある。これらを考えると、金杉建設にとって、草刈り作業の自動化は必然の流れだったのかもしれない。
「転職するか悩んでいる…」 まずはご相談ください【施工管理求人ナビ】
既存のマシンを改造すれば可能性はある
ただ、当然ながら、金杉建設に草刈り機の自動化に関するノウハウがあるわけではない。そこで、過去のコンソーシアムでもタッグを組んでいた、コンピュータシステムや機械の開発販売などを手掛けるアクティブ・ソリューションズの島村明さんに相談を持ちかけた。
「私は過去にゼネコンに勤務していたことがあるのですが、そのときに、バギーに測量機器を乗せて、自走実験を行ったことがありました。既存のマシンを改造すれば、『実現できる可能性があると思います』とお答えしました」(島村さん)。今回の草刈り機の研究開発は、そういうところからスタートした。
話が本筋からズレるが、金杉建設コンソーシアムメンバーには、PRISM採択プロジェクトのコンソーシアムが大手ばかりなことに対する不満が少なからずあるようだ。「他の中小企業にももっと(PRISM採択に)チャレンジしてほしい」(藤沼さん)という声があるからだ。地場の建設会社の間には「研究開発は大手がやるもの」という風潮があるが、中小企業、小規模工事に特化した研究開発がもっと増えても良いとは思う。
自律走行だが、完全自動走行ではない

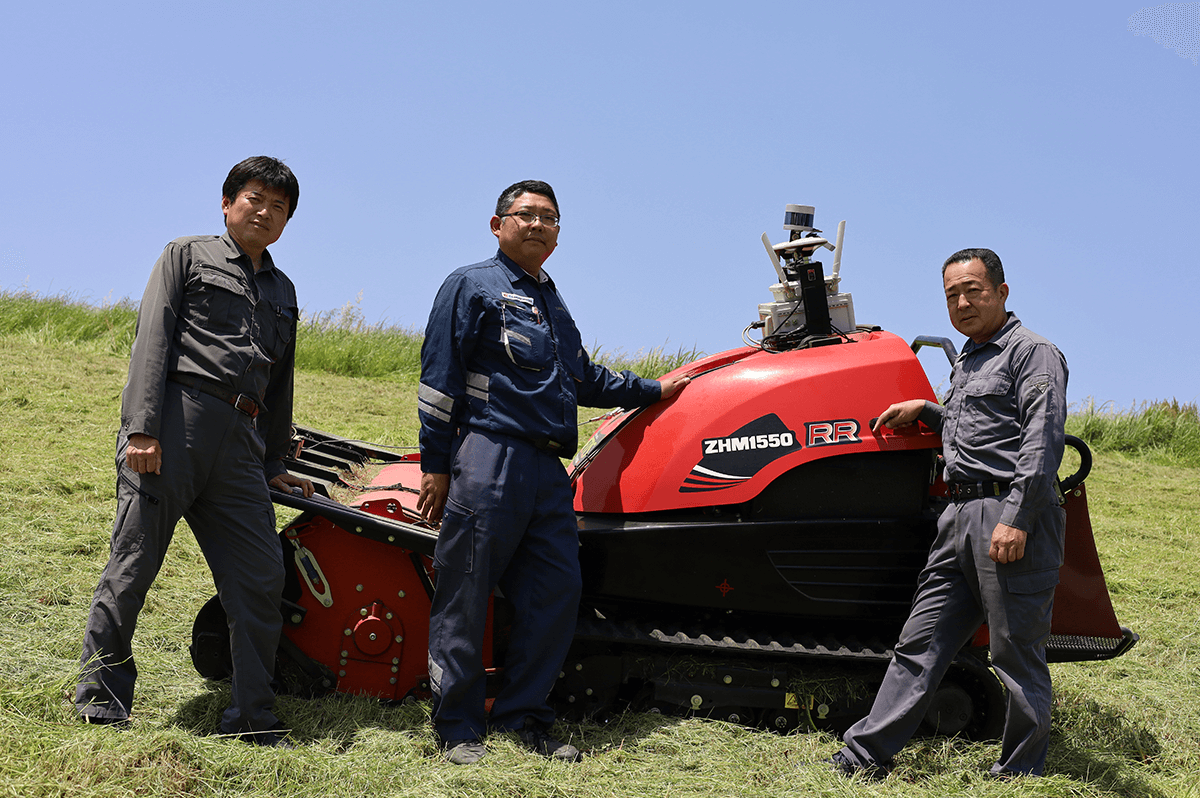
金杉建設などが開発中の自動草刈機
システムとしては、GNSS受信機、全方位Lidar、IRカメラ、3Dモーションセンサー、バンパーセンサーなどを取り付けたマシンを、Wi-Fiなどの回線を介して、CAN通信で制御するという構成になる。走行経路は、GoogleマップやGNSS(3Dデータ、CAD)などを活用して作成し、マシンにコマンドを与えるカタチをとる。ロボット掃除機のように、マシンが自分で判断して勝手に動く自動化とは一線を画す。言うなれば「半自動」と言ったところか。ちなみに、この草刈り機は、GNSSの精度が低下すると作業できないが、夜間は作業できるらしい。
なお、自動ロボット型を採用しなかったことについては、「技術的な理由と言うよりも、ルール的な理由です」(藤沼次長)と明かす。柵も仕切りもない堤防上をロボットが勝手に動き回ることについて、今のところ、国のガイドラインやルールが一切ないためだ。草刈り機が支障物に乗り上げたり、イタズラされるリスクなどもある。完全自動化だとしても、現状のルール下では、マシンの作業を監視する人間はいずれにしても必要になる。

金杉建設自動草刈機 / YouTube(大石恭正)
油圧操作を電気信号操作に切り替える

タブレットでコマンドを送る松本さん
改造のベースマシンは、過去に一緒に仕事をしたことがあったハクスバーナ・ゼノア社の有人操作機「ハンマナイフモアZHM1550RR」を選んだ。関係者の間では「1号機」と呼ばれている。主な改造メニューとして、下記を施した。なお、改造自体は専門会社に依頼した。
- リレーの追加(電磁式クラッチなどの電気操作のため)
- 走行レバーの改造(回転角や移動量を電圧に変換する機器の取り付け)
- 操作パネル改造
- 油圧ポンプ交換(搭乗操作+電気・遠隔操作切り替え)
- 電子制御機器(ECU)追加
- クラッチ改造
これらの改造点は、ようするに油圧操作から電気信号操作に切り替えるための改造を施したものだと言える。同時に、タブレット端末で操作できる現場管理ソフトも開発した。走行経路の作成をはじめ、開始や停止などの遠隔操作はタブレット端末(ブラウザ上)で行っている。また、除草面積の算出や帳票の出力、走行時間や距離などの作業日報の出力もできる。
「堤防を痛めない走行」の実現に一番苦労した
草刈り機の遠隔制御に関するプログラミング、センサー検知などに関するソフト開発は、建機などの遠隔制御、自動化を手掛けるベンチャー企業ARAV株式会社が担当した。メーカーやマシンを選ばない汎用性のあるソフトウェアが必要だったことから、ARAVに白羽の矢が立った。
ハードとソフトのコーディネートは、島村さんが統括したが、遠隔操作を確立する上で、カギになったのがコマンド制御まわりだった。「どれぐらいの電流値を流せばマシンをスムーズに制御できるのかについては、試行錯誤を繰り返しながら、最適化していきました。一番苦労した部分です」(島村さん)と振り返る。
と言うのも、草刈り機に求められる機能は、たんに草を刈ることだけではないからだ。「堤防を痛めない走行」(藤沼さん)をする必要があった。たとえば、方向転換する際などに堤防を掘り返すといったことだ。そのほかにも、待機時間やロスタイムをなくす、刃を上げたときに刃の回転を止める、ラップ不足などに伴う刈りムラをなくす、法面に対して垂直に刈る、といったさまざまな制御が求められた。プログラミングの見直しも含め、時間をかけて細部をツメていった。
この点、コンソーシアムメンバーとして開発に関わった創和の西尾貴至さんは「1年目と3年目を比べると、走り方や起点の取り方が改善されたので、作業効率は大幅に向上しています。たとえば、国土交通省の(有人操作の)積算基準を20%ほど上回っています。Googleマップなどの座標データだけで走るより、あらかじめ外周だけを自走して変化点座標を取得したほうが効率が良い傾向にあります」と指摘する。
もちろん、中には誤算もあった。人物検知のために取り付けたLidarセンサーだったが、刈り上げた草に反応して、マシンが停止してしまう症状が頻発した。センサー付きの自動車でもお馴染みの「センサーの誤爆」というヤツだ。人物検知はカメラとバンパーセンサーが担うこととし、Lidarセンサーは地形検知のみに活用するという、方向転換を余儀なくされたということはあった。なお、カメラによる人物検知では、AIによる画像解析を利用している。
複数台同時に稼働してこそ、生産性の向上につながる
こういった経緯を経て、開発開始から2年が経ったころ、草刈り機の実用化のメドがつくようになった。除草面積も有人操作と同等レベルに達し、刈り残しなども見当たらなかったほか、遠隔操作の信頼性、人物検知など安全性なども検証、確認することができたからだ。
そこで1号機で培ったノウハウを活かしつつ、間髪入れず2号機の製作に着手した。なぜなら、このプロジェクトでは、構想段階から複数の草刈り機を同時に稼働させることを目指していたからだ。逆に言えば、複数台同時に稼働させてこそ、草刈り作業の生産性の向上につながるということだ。その理由は簡単で、1名の作業員で複数台を管理することで、はじめて作業人員を減らすことができるからだ。
2号機のベースマシンは、マッコネル社の大型ラジコン式高性能草刈機「ROBOCUT」を選んだ。1号機との違いは、2号機はラジコン式なので、操作系の改造が不要、センサー類などを取り付けるだけで良い点だ。ベース価格は1号機より高いが、改造不要な分、最終的なコストは2号機のほうが安い。ただ、ハードの構成は同じでも、制御に関するパラメータが1号機と異なっていたため、制御系のカスタマイズには2ヶ月ほど要した。
2台同時は予想通り、本命は3台同時稼働
あいにく取材当日は2号機は不在だったが、2台の草刈機で実際に作業してみたところ、上々の結果が出たらしい。1日当たりの除草面積が従来に比べて広くなったらしい。
除草自体の時間はベテラン作業員の作業効率とほぼ同等らしいが、作業員の能力差や休憩時間などを考慮する必要がないことを考えると、「作業時間の短縮、ひいては生産性の向上を期待できる結果が出ました。2台同時は問題なく運用できることはある程度予想していましたが、これなら3台同時も可能性があると思っています」(藤沼さん)という評価になるらしい。
ゆくゆくは草刈り機を商品化したい
コンソーシアムメンバーには、ゆくゆくは「草刈り機を販売したい」という思いがある。マシン制御のパラメーターさえ開示してもらえれば、どんなメーカーのマシンであっても、後付けすることで、商品化できるからだ。「マシン販売だけでなく、リースも十分可能であると思っています」(西尾さん)という声もある。現在のところ、地方部を中心に、堤防はもちろん、広い場所での草刈り作業をマーケットとして視野に入れているようだ。
ただ、商品化のためには、適宜のアップデートが必要になってくるだろう。藤沼さんによれば、5G搭載も視野に入れているそうだ。蛇足だが、5Gにすると、コスパが著しく悪化しそうなので、個人的にはその必要はないと思う。
[PR]なぜ施工管理技士の資格は「転職=給与アップ」に有利なのか?
全部機械で刈ることはできない
草刈り機が今後、機械的、技術的に飛躍的に進化したとして、草刈り作業はどう変わるのだろうか。松本さんはこう指摘した。
「この現場は比較的草刈り機で刈りやすい現場ですが、それでも全部が全部機械に任せることは、現場をあずかる者としてできません。人手はどうしても必要です。機械では刈れない部分はどうしても残るし、異常があったときの報告なども、今のところ人でないとできないからです」
「たとえば、簡単な場所は機械で刈って、難しい場所は人が刈るというすみ分けをすれば、うまくいくかもしれません。作業員もラクになるでしょう。ただ、そうなると、作業員の刈る面積が減るので、作業員の仕事量も減るリスクがあります。作業員の全体数が減っているので仕方ないとは思いますが、難しいところですね」
メカの部分はさておき、機械と人の作業のすみ分け、監視業務の労務単価の設定。とりあえず、この辺りをどうルール化するかが、草刈り機の今後の普及の一つのカギになってきそうだ。