

吹付け作業の自動化で、生産性向上へ
耐火被覆材であるロックウールの吹付作業は建設業界において一般的だが、ロックウールは玄武岩、鉄炉スラグなどに石灰などを混合し、高温で溶解し生成される人造鉱物繊維であるため、飛散したロックウールが肌に触れるとチクチクする欠点がある。
そのため、作業中は防護服を着用する必要があるが、高温多湿の環境においては作業員が熱中症になることがあり、かねてよりこの吹付作業だけでも自動化できないかという声が上がっていた。
そこで、大和ハウス工業株式会社は2017年から「耐火被覆吹付ロボット」の開発に着手。2018年よりエス.ラボ株式会社とともに改良を重ね、2021年から実現場での試行が開始され、ロボットによる吹付作業の自動化により、生産性を30%向上するなど、一定の成果が得られた。
現在、ロボットの開発・改良を担当している同社総合技術研究所 建築技術研究部 施工生産研究グループの野村勇樹氏に、ロボットの現場への導入状況について話を聞いた。
耐火被覆吹付作業の職人がひっ迫


左から大和ハウス工業株式会社総合技術研究所 建築技術研究部 施工生産研究グループの野村勇樹氏と一緒に働いている同グループの南川達浩研究員
――吹付ロボットを開発していますが。
野村 勇樹氏(以下、野村)当社の現場監督へのヒアリング調査で、さまざまな建設工事の中でも耐火被覆吹付作業の職人の確保に苦労しているという結果が出ました。
加えて、耐火被覆材であるロックウールは繊維が肌に付着するとチクチクするため、作業に当たっては夏場でも防護服を着て作業する必要があり、熱中症のリスクもあります。
そこで、吹付作業をロボットに代替していくことで職人の負担を軽減することが、労働生産性の向上に繋がっていくと考え、2017年5月から鉄骨の耐火被覆吹付について自動化の開発に着手しました。
その後、2018年4月には産業用ロボットアームと走行台車、昇降台車を組み合わせた「耐火被覆吹付ロボット」として現場で実証実験を開始しました。そして、2021年1月から同ロボットの改良版を神奈川県内や東京都内の現場で実用化に向けた試行をしています。

「耐火被覆吹付ロボット」初号機
――ロボットの機能や構成を教えてください。
野村 ロボットは3つの機能から構成されています。具体的に、「メカナムホイール」を用いてロボット自体が全方向に移動できる機能、パンタグラフ式リフターで様々な天井高に対応できる昇降機能、細かい場所を吹き付けるのにロックウールの突出口の部分を調整するロボットアーム機能です。
2018年4月の「ダイワロイネットホテル東京有明」の建設現場での実証実験段階では、ロボットアームを縦向きに設置していましたが、今回は横向きに設置することで、柱の最下部などロボットでは吹付が困難とされていた部分にもロボットアームが届くよう改良し、吹付可能範囲を大幅に拡大させています。
さらに、実証実験では吹付高さは4mほどが限界でしたが、上昇用アクチュエータを縦に設置することで省スペース化と吹付可能高さ7mを実現しています。加えて、走行台車のタイヤの改善もはかり、建設現場の限られたスペースで使用することを考慮し、走行台車の車輪に全方向移動が可能なメカナムホイールを採用することで、縦・横・斜めなどの移動を可能にしました。
耐火被覆吹付作業の作業効率を30%向上可能に
――ロボットによってどの程度の作業効率の向上が期待できる?
野村 同機はタブレット端末を活用しての遠隔操作ができます。また、現場の図面情報があれば自動で吹付作業を行うことも可能です。
これにより、耐火被覆吹付作業の作業効率を30%向上させることができます。人による作業では1日あたり150~160m2の作業量が通常ですが、ロボットを導入した場合の耐火被覆吹付作業では1日あたり200m2以上の施工スピードを実現します。将来的には人が休憩している時間にも動作させることで、さらなる作業量のアップを見込んでいます。
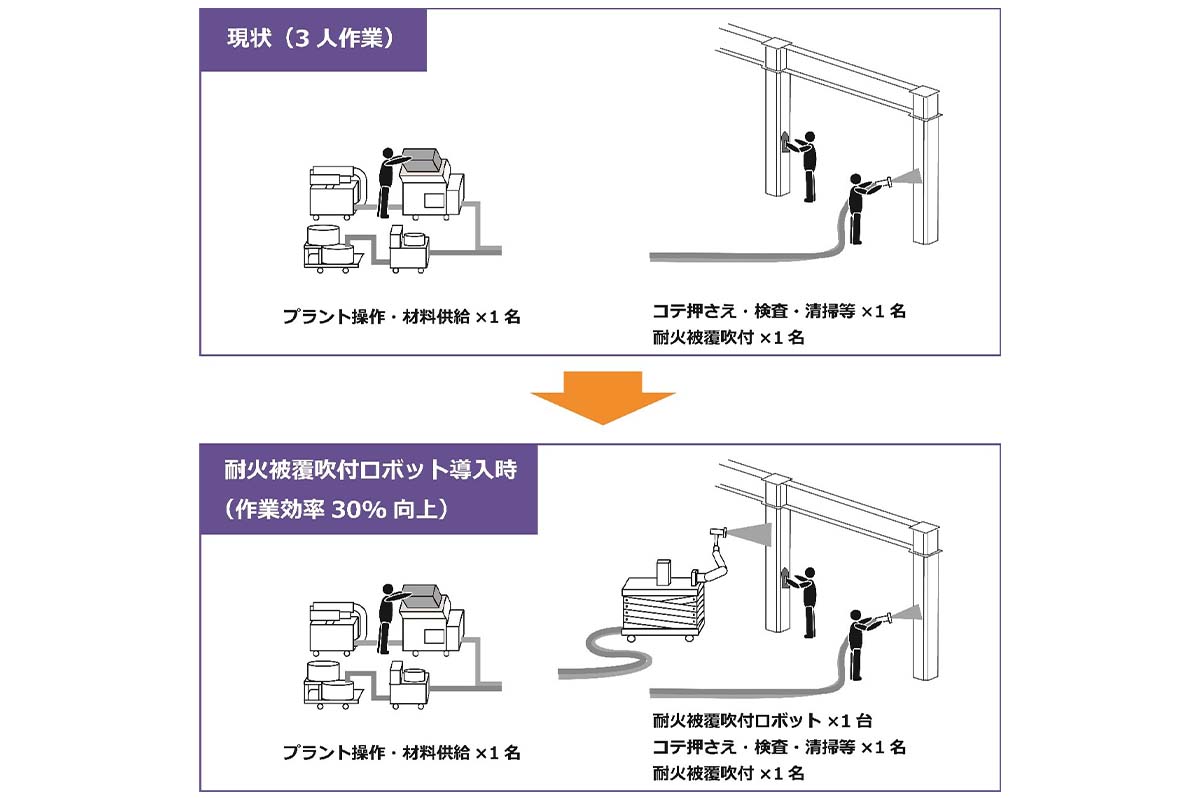
ロボットを活用することで、作業効率30%向上
プラント操作や清掃、コテ押さえは高度な技能を必要とせず、入職された方がすぐに携われる職種ですが、吹付作業は熟練技能を必要とするため、これをロボットで代替できるようになることで熟練工の減少という問題解決にも寄与することになります。
さらなる小型化、軽量化でホテルや介護施設への導入も
――ロボット施工での手順は?
野村 建設現場にロボットを搬入したのち、ロックウールプラントとホースを繋げます。そして、タブレット端末で現場情報データや位置情報を認識させてから、稼働させます。
位置認識には、株式会社トプコンの3次元計測機「LN‐100」と計測時に使用する「プリズム」を併用することで、数cmの誤差で吹付位置の調整ができるようにしています。
――ロボットのサイズ感は?
野村 長手方向で2,300mm、横方向が1,200mm、高さ2,100mmで、重量は1.4tでトラックでの運搬やクレーンで吊り上げて現場に搬入することもできます。計算上では、大型のエレベータに載せることも可能です。
――今後の改良ポイントは。
野村 吹付作業自体の施工スピードは早くなりますが、ロボットの移動時間も含めたトータルで見ると、まだ職人作業よりも施工時間が掛かるため、ここを同程度にできればと考えています。
また、小規模な物件だと、現場に搬入する労力に対して効果も小さいため、現在導入を想定している現場は物流施設などの大型現場ですが、より小型化することで介護施設やホテル等の小規模現場にも適用できるようにしていきたいと思います。
――BIMとの連動も進んでいく?
野村 はい。現在も図面データにある柱と梁などの部材の大きさや柱の距離等の情報から、吹付作業に必要な経路計画を自動で作成できます。また、ロボットが作業を行う上で必要なデータ入力項目を削減するため、BIMと連動させることを想定した仕様で開発しています。
――今後の展開については。
野村 まずは社内での実例を増やしていくことが先決です。社内から「これは使える」という意見を増やさなければなりません。その上で、他社などから「外販してほしい」「リースしたい」というお声があれば、その期待に応えるレベルに向上していければと思います。