
AI建築ロボット、次世代建築生産システム「シミズ・スマート・サイト」
人間と協調しながら働く協働ロボット、通称「コボット」(cobot、Collaborative Robotsの略)が急速に普及しつつある。それは建築業界も例外ではない。
先陣を切ったのは、大手ゼネコンの清水建設が発表した次世代建築生産システム「Shimz Smart Site(シミズ・スマート・サイト)」。
シミズ・スマート・サイトの中核を成すのは、清水建設が10億円超を投じて開発した、3種類のロボットたちだ。
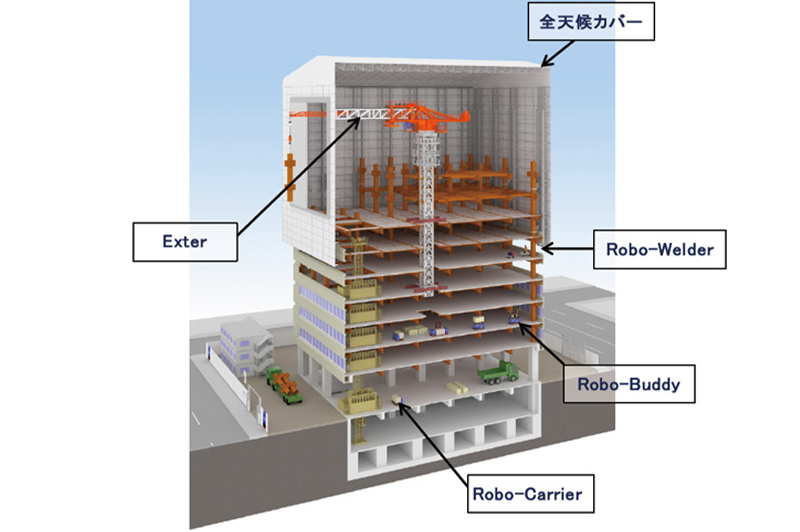
資材の水平搬送ロボット「Robo-Carrier(ロボ・キャリア)」、天井等の内装施工を担う多能工ロボット「Robo-Buddy(ロボ・バディ)」、そして、鉄骨柱の溶接ロボット「Robo-Welder(ロボ・ウェルダー)」を組み合わせて使う。
シミズ・スマート・サイトとは、これらのAI(人工知能)を搭載した自律型ロボットと、建物の3次元モデルであるBIM(ビルディング・インフォメーション・モデリング)を連携し、現場で人間と一緒に作業するシステム。AIロボットをBIMと連動させることで、建物状況に合わせた作業を行うことができる。
しかし、建築現場へのロボット導入は、そう簡単な道のりではなかった。
清水建設のロボット開発経緯
清水建設では、これまでも現場向けのロボットを開発したことがあった。しかし、ロボットを動かすためには、そもそも人が介在する必要があるという問題を抱えていた。
さらにロボットによる施工は品質も低く、手直しが多いなど、結局は「人がやった方が早くて手直しも少ない」という声も多かった。それは過去数十年、どこのゼネコンも同じだった。
そこで新しい技術であるAIやIoT、ディープラーニング、センシング、高速なCPU能力などに注目。「他分野で使われている技術」(10社1大学)と、清水建設の「建築のノウハウ」を組み合わせて、自律型ロボットを開発するに至った。

シミズ・スマート・サイトによる施工イメージ / 清水建設
清水建設では、シミズ・スマート・サイトを30階建て、基準床面積3,000m2クラスのビルに、シミズ・スマート・サイトを適用した場合の省人化の効果(削減率)は、揚重・搬送作業で75%(2,500人)、天井・床施工で75%(2,100人)、柱溶接作業で70%(1,150人)と、計6,000人近くになるという試算結果も出している。
省人化効果により、個々の建機・ロボットは2~3現場転用することで減価償却が可能だという。
資材搬送も内装工事も溶接も、AIロボットで施工

水平搬送ロボットのRobo-Carrier(出典:清水建設)
水平搬送ロボットの「Robo-Carrier(ロボ・キャリア)」は、レーザーセンサとBIM情報を照合し、自分の所在位置を認識することで、現場に搬入された資材を指示された場所まで自動搬送するロボット。障害物があると搬送ルートを自動的に再検索・修正もできる。
地上階に配備したRobo-Carrierがパレット積みの資材を、Robo-Carrierと連動するELV「Autonomous-ELV」に積み込み、ELVが搬入階に到達すると、別のRobo-Carrierが資材をパレットごとELVから積み出して仮置き場まで搬送する。

内装多能工ロボットのRobo-Buddy / 清水建設
内装多能工ロボットの「Robo-Buddy(ロボ・バディ)」は、レーザーセンサとBIM情報を照合し、自分の所在位置を認識することで、指示された作業場所まで自動で移動。30kgの資材までつかむことができる2台のロボットアームを、6軸で自由自在に動かし作業するロボット。
自動走行台車の昇降式台座上で稼働し、画像センサとレーザーセンサで施工部位を認識した上で、2本のロボットアームを駆使しながら、天井吊ボルトのインサートへの挿入や天井ボードの取り付け、ビス留め、OAフロアの台座・パネルの設置など、さまざまな作業で活躍できるロボットだ。
鉄骨溶接ロボットのRobo-Welder / 清水建設
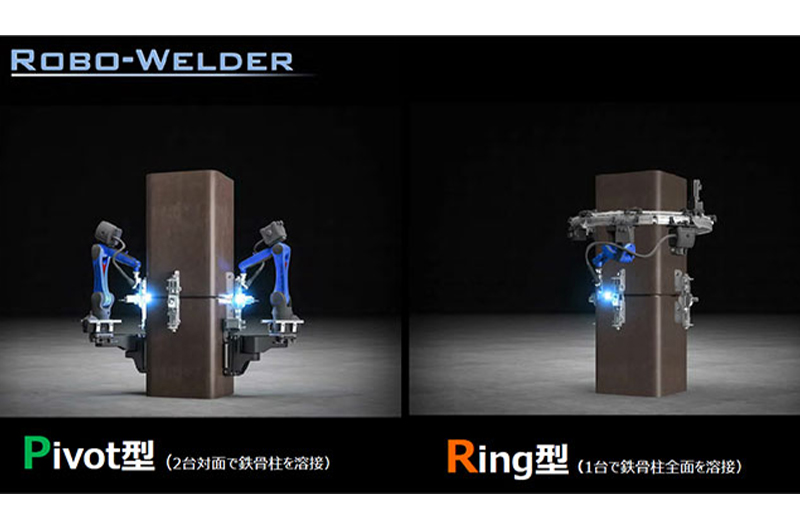
鉄骨溶接ロボット「Robo-Welder(ロボ・ウェルダー)」は、作業員が手伝わなくても「完全自動」で溶接を行うことができるロボットだ。レーザー形状計測で溶接部位の溝の形状(開先形状)を認識。6軸で自由自在に動くロボットアーム先のトーチで、その溝を溶接材料で的確に埋めていく条件をリアルタイムに決定し、作業を進める。
Robo-Welderは、ロボット2台が対になって溶接作業を行う「ピボット式」と、鉄骨外周のレール下に設置したロボットアーム1基で全面溶接を行う「リング式」の2タイプがある。
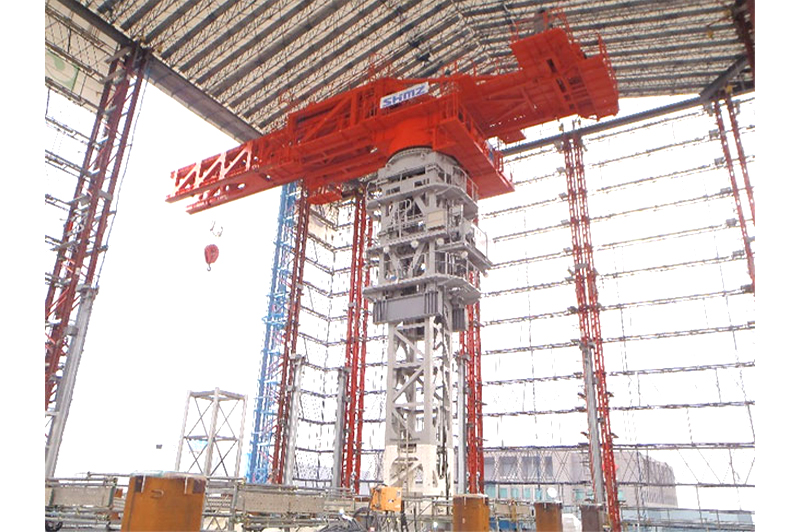
水平スライドクレーンのExter / 清水建設
また、シミズ・スマート・サイトの適用現場では、施工中の建物の頂部を全天候型カバーですっぽり覆い、カバー内に配置した水平スライドクレーン「Exter(エクスター)」を用いて鉄骨柱等の資機材を揚重する。
Exterは、水平方向に伸縮する新開発のブームにより作業半径を自由に調整できるタワークレーンだ。最大吊(定格)荷重12t、作業半径3~25m、揚程(揚重高さ)200mで、水平方向に伸縮するブームは3体に分割され、クレーンの根本に位置する最大外寸の固定式ブームの中に中間と先端のブーム2体を納める構造になっている。
資材の揚重作業時には、ブームを先端部から順に送り出して延伸、全天候カバー側面に設けた開口部からブームを外に突き出し、地上部から資材を揚重してはブームを縮めて全天候カバーの中に資材を取り込む。全天候カバー内では、ブームを伸縮・水平旋回させて所定の位置に吊荷を下ろす。
シミズ・スマート・サイトの初適用は「からくさホテルグランデ新大阪タワー」
清水建設がこれらのロボットを初めて現場で適用したのは、新大阪(淀川区宮原)で建設を進めている高層ホテル「からくさホテルグランデ新大阪タワー」の工事現場。
工事規模は地上24階、地下1階、建築面積1,050m2、延床面積18,450m2、工期は2017年6月20日~19年8月末を予定している。
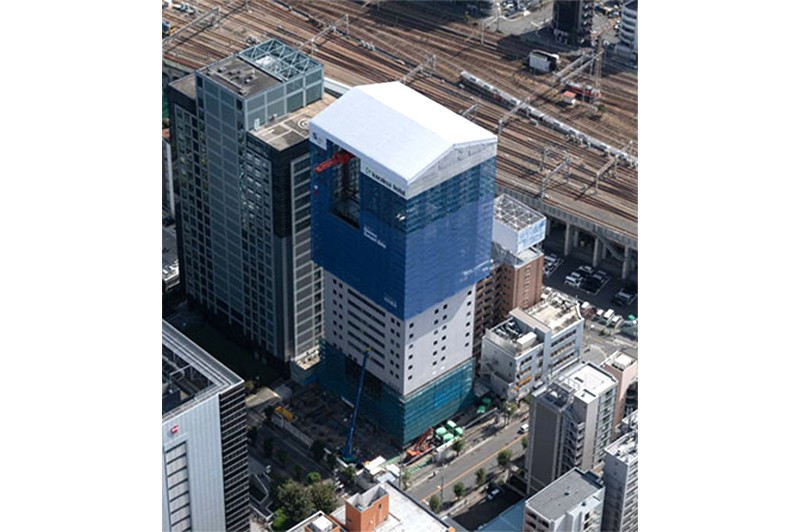
「からくさホテルグランデ新大阪タワー」の10月末時点の北西方向からの現場航空写真 / 清水建設
当現場では、資材搬送や鉄骨柱溶接、天井ボード貼りなど、複数の作業の一部で、「Robo-Carrier」、「Robo-Buddy」、「Robo-Welder」の3種類のAI建設ロボットたちが、作業員とコラボしながら自律的に稼働している。工事の進捗に応じて段階的にシミズ・スマート・サイトを適用してきた。
最初に現場に実装したのはExterで、今年3月から資材の揚重作業を開始。建物の鉄骨が7階まで立ち上がった8月には、幅30m、奥行き40m、高さ40mの全天候型カバーが完成。以後、建方の進行に合わせてカバーを上部へクライミングさせながら工事を進めてきた。
AI建設ロボット3機種は、まずRobo-Carrierを10月上旬から荷取場の1階と搬送先階での水平搬送をそれぞれ担う計2台稼働させた。現場作業終了後の夜間帯に、1台が1階の荷取場で天井ボード等を載せたパレットを受け取り、垂直搬送エレベータ内に仮置きし、もう1台が施工階まで上昇したエレベータからパレットを受け取り所定の荷置場に搬送している。
来年2月まで稼働予定で、最終的に天井ボードとエアコンユニットを20フロア分、各階50~60パレットの計1,000~1,200パレットを搬送する。
Robo-Buddyは、12月上旬に現場に導入。今後、3階ロビーや一部客室の吊り天井を施工する予定だ。
Robo-Welderについては、9月上旬から9~24階の鉄骨柱を溶接する予定だったが、現場溶接に対応した新方式のロボット開発を優先したため、作業実績は10月と11月に各1回実施した鉄骨柱2本の溶接に留まっている。
清水建設は、来年からロボットを東京都内の大規模現場を中心に稼動させていく予定。人とロボットが協働できる環境をつくり、建設現場のイメージを変えていけるか注目だ。