

首都高D&Dのミャンマー人3Dオペさんに聞く。なぜ日本のドボク業界で働くのか?
3D業務の担当技師である2人のミャンマー人女性 先日、首都高デジタル&デザイン株式会社(以下、D&D)の女性管理職社員である板橋さんと中下さんの記事を出した。今回は、3D業務の担当技師である2人の女性に登場してもらう。こ...
トンネルやもりん(画像:首都高D&D提供)
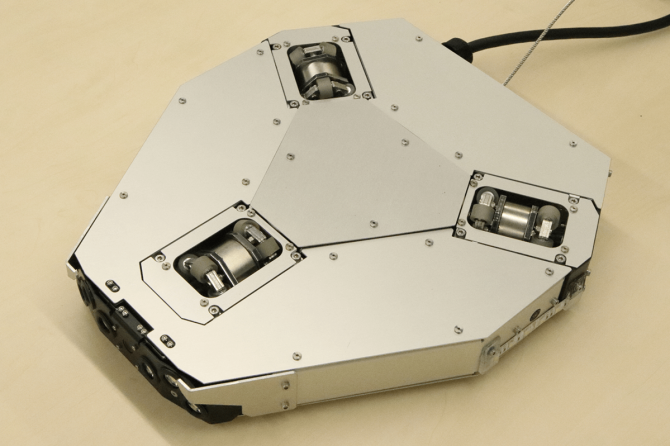
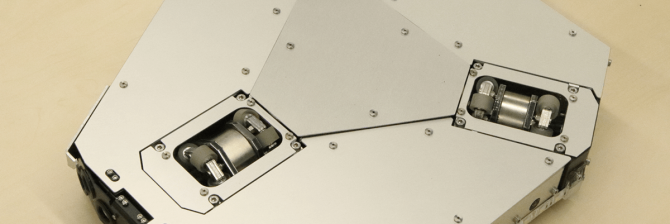
首都高技術株式会社、首都高デジタル&デザイン株式会社(以下、首都高D&D)、大栄工機株式会社(本社・滋賀県長浜市)はこのほど、NATMトンネルの覆工コンクリート施工に際し、セントル(移動式型枠)に磁石などで吸着させることで、地山とセントルの幅(コンクリートの厚さ)をはじめ、打設状況や品質などを遠隔操作で確認できるロボット「トンネルやもりん」を共同開発した。
トンネルやもりん動画(首都高D&D HPより引用)
NATM工法によるトンネル施工には、地山を掘削した後、セントルを用い、トンネル内部を覆工コンクリートで覆う工程がある。この際、地山(地山には防水シートが張られる)とセントルの間に、約30cmの幅を確保した状態で、コンクリートを打設しなければならない。
覆工コンクリート施工は、往々にして場所が狭隘であり、断面も複雑なため、締固めなどの作業は困難を伴う。そのため、コンクリート厚不足などの施工不良が起きやすい。コンクリート厚が足りないと、コンクリートの剥離や崩落といったリスクが高まる。幸か不幸か、供用開始前にコンクリート厚の不足が発覚した場合、覆工コンクリートを取り壊して、やり直しという事態もあり得る。
コンクリート幅や打設状況などを確認するため、セントルにはいくつかの検査窓が開けられている。従来の手法の場合、点検担当の人間がこの窓に頭を突っ込んで、照明で照らしながら、異常などがないか目視で確認する。ただ、狭隘な暗がりの中での目視確認なので、地山との幅を正確に測れない、死角が生じてそもそも確認できない、点検者の熟練度やセントル長にもよるが、非常に時間がかかる、などの問題点がある。
トンネルやもりんは、覆工コンクリートの施工不良を発見するとともに、点検ミスをなくし、確認作業時間を短縮するために、考案開発されたロボットだ。
ロボット開発は、大栄工機が首都高グループに「セントル内部での作業工程を確認できるロボットをつくれないか」と相談を持ちかけたことに始まる。大栄工機はそれまで、首都高グループとはなんの関わりもなかったが、担当者がたまたま、首都高グループが数年前から開発していた磁石式鋼橋点検ロボット「やもりん」をテレビで見たのが、きっかけだった。
首都高技術と大栄工機はまず、既存のロボット「やもりん」を使って、セントル内部での点検確認ができるかテストを行った。結論としてはダメだった。やもりんはキャタピラ駆動だが、セントル上をナナメに進むとき、ギアに負担がかかりすぎて、プラ製ギアが溶けてしまったからだ。ロボットを改良調整し、臨んだ2回目のテストでも、満足行く結果は得られなかった。
「さて、どうしたものか」となったとき、首都高グループのロボット担当としてテストに参加していた首都高D&Dの高田光さんは、イクシスという会社がけっこう以前に開発していた「MagBug」というオムニホールを採用したマグネット式全方位点検ロボットのことを思い出した。
「MagBugは10年ほど前に紹介されたロボットで、これならイケると思いました。イクシスの担当者にやれるかと聞くと、やりますと言ったので、MagBugをベースにした新たなロボット開発がスタートしました」(高田さん)と振り返る。
結論から言うと、MagBugをベースにしたロボットは基本的にイケた。
ネックになったのが、セントルに空いた検査窓だった。検査窓の大きさはモノにもよるが、60cm四方〜40cmほどあり、ロボットが窓から落ちてしまう危険性があった。また、点検中、なにかの拍子でセントル内部で滑落してしまった場合、救出が極めて困難になるのも問題だった。
そこで、ロボット2台を有線ケーブルでつなぎ、親機と子機として運用することにした。親機はセントル上部を移動しながら、子機の動きを補助するカタチだ。子機が点検窓にハマったとしても、落下を防ぐことができるようにした。親機と操作端末(PC、タブレット)も有線ケーブルで結んだ。万が一、親機もろともロボットが落下した場合でも、ケーブルを手繰って救出することができるようにした。
開発開始からわずか半年後、関東のとあるトンネル現場に、トンネルやもりんの試作機を持ち込み、確認テストを行った。結論から言えば、上々の結果が得られた。



セラミックのギアとかどうなんですかね?
方向転換出きる車輪を1個付けるだけでも変わる気がします。
親機子機2台作るより安価な気もします。
窓に落ちると言う事はスピードが早いんでしょうか?