「鉄筋の結束は、もう職人がやる仕事じゃない」 香川発の建設ロボが、鉄筋職人の汗一粒の価値を高める
ロボットで職人の汗一粒の価値を高める 地方から果敢に建設DXにチャレンジしている男がいる。建ロボテック株式会社の眞部達也社長だ。 眞部社長が開発したのは、鉄筋の協働型鉄筋結束ロボット「トモロボ」。自らが鉄筋職人出身でもあ...
――ざっくりした質問ですが、先生の研究に占める建設分野の割合はどのぐらいですか。
山下さん 半分ぐらいです。
――ロボットの研究と土木関係の研究は、どのように決められているのですか。
山下さん ロボットの研究は、基本的に自分の興味関心のあるテーマを選んでいます。これは重要だなと思うテーマがあったら、その研究をするために必要な手続きをとって、自ら研究します。
一方で、土木関係の研究は基本的に共同研究です。共同研究では、各社ごとに解決したい課題があって、われわれも一緒にその課題を解決していく方式です。私が自ら課題設定しているわけではなく、ゼネコンさんなどからご相談をいただいて、取り組んでいるわけです。
つまり、ゼネコンさんなどは、ロボットの研究をしたいのではなく、現場の課題を解決したいのであって、それを解決するための手段としてロボット技術を活用したいというお考えをお持ちで、われわれは、共同研究を通じて、それをお手伝いするという関係性ということです。
そういう感じで、研究テーマを決めています。
――研究室には留学生もいるようですね。
山下さん そうです。おかげさまでいろいろな国から来ていただいています。研究室には現在、スタッフを含め43名が在籍しています。

カメラとレーザで自己位置を推定するユニット(山下教授提供)
――建機の遠隔化、自動化といったところも研究ターゲットに入っているのですか。
山下さん そういう研究もやっています。あるゼネコンから社会人博士として研究室に所属している方がいるのですが、建機の自動化に必要な自己位置推定の研究をしています。自己位置推定に使われる技術としてはGPSがありますが、山奥とかだと、つながらないことがあります。われわれの研究では、カメラやレーザを使って自己位置推定するということをやっています。センシングを応用した技術です。
――センシングと言っても、自動車に求められるセンシングと建機に求められるセンシングでは、異なる部分もあると思われるのですが、その辺はどうですか?
山下さん 自動車にしても建機にしても、自分が今どの位置にいるのかを把握する点においては、共通していると思います。大きく異なると思われるのが、周りの環境に対するセンシングの部分だと思います。
自動車のセンシングは、移動のためのセンシングなので、周りの環境、たとえば道路環境などをセンシングする必要はありません。一方、建機のセンシングは、作業のためのセンシングなので、土を削ったり、土を盛ったりするので、刻一刻と変化する周りの環境をセンシングする必要があるということです。
――カメラでセンシングするのと、レーザでセンシングするのとでは、違いがあるのですか。
山下さん そこにはいろいろな違いがあります。たとえば、建機にカメラを付けて映像を撮るのは、映像を見ながら、人間が操作するためです。つまり、人間が理解しやすい情報を提示するための機器ということです。それに対して、レーザは、人間が見るというより、取得した情報をシステム内部的に処理するためのものです。カメラでも3次元データが取れないわけではありませんが、人が見るための情報ではないので、3D点群データのほうが効率的なわけです。内部的な処理には、たとえば、建機の車体制御の処理といったことがあります。
――センシングやAIを活用すれば、いずれは、人間の経験や感覚に頼らず、いろいろな作業ができるようになるのでしょうか。
山下さん われわれとしては、それを信じて、そうなれば良いということで、研究しています。熟練の技術者が持つ技術はもちろん素晴らしいものですが、今後、そういった方々は減っていくことが予想されています。そこに作業を自動化したいという社会的ニーズがあるわけです。
たとえば、さきほど触れた打音検査のロボット化で言えば、まず、状態が良い音のデータと悪い状態のデータをたくさん集めます。それをAIに学習させて、打音の良し悪しをAIに判定させるというシステムになっています。このシステムによって、必ずしも熟練した技術者でなくても、打音検査ができるようになるわけです。
ただ、現実の問題としては、たとえ良い技術を開発しても、人がやっていたものをすぐに機械に切り替えられるわけではありません。あと、人から機械に切り替えた際に、生産性や効率性が一時的に落ちることもあります。
たとえば、計測機器を設置して、機器を操作するより、メジャーで計測するほうが早かったりするからです。ただ、長期的に見れば、メジャーで計測する人間がいなくなる可能性があるので、大学の研究者という立場から、世の中の役に立つ技術をいろいろ提案させていただいている感じです。
――良い技術であっても、実際の現場ではなかなか受け入れられない現状があると思いますが、どうごらんになっていますか。新しい技術が導入されるためには、現場の人が納得できる、見てわかるための工夫も重要だと考えています。
山下さん 確かにそういうことはあると思います。新しい技術であっても、現場の人にとってはブラックボックスになっている面があると感じています。たとえば、目に見えるレーザ計測装置を開発して、トンネル内で照射するといった研究をしています。ドローンや三脚に機器を載せて、今どこにレーザが当たっているかをわかるようにして、トンネルの断面形状を計測するわけです。
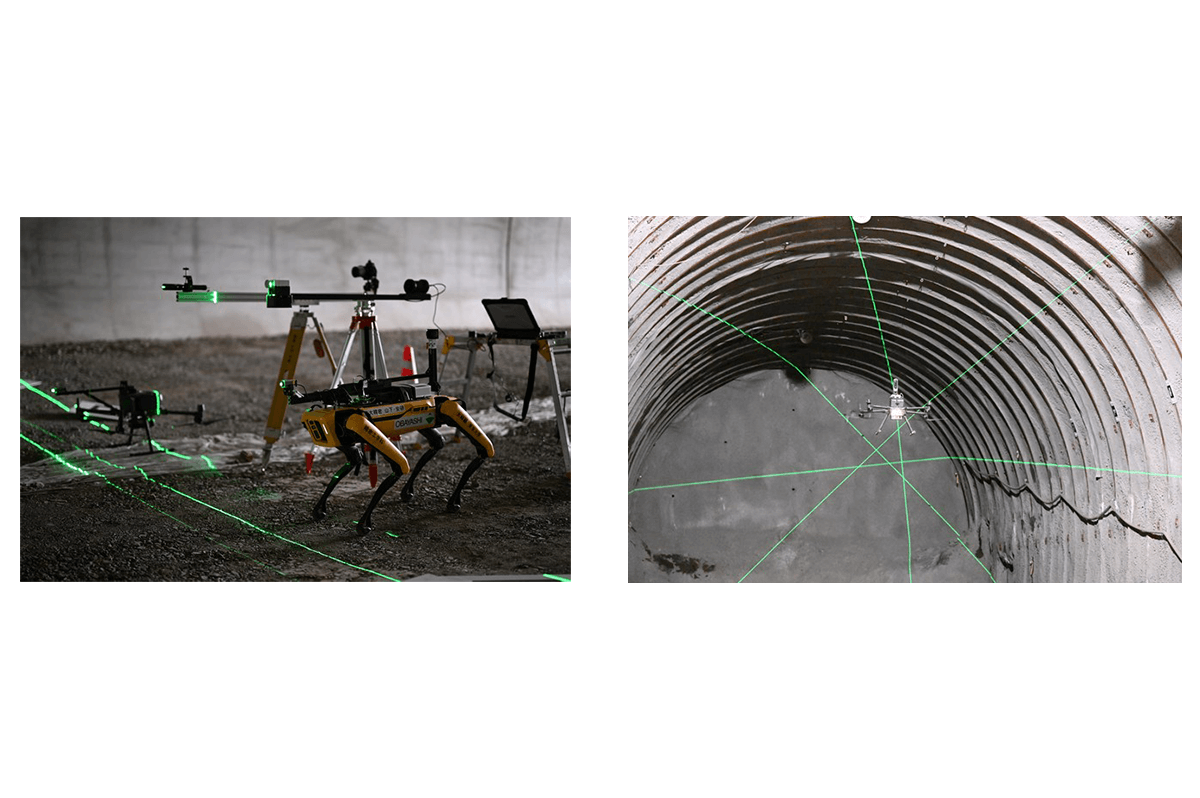
目に見えるレーザ計測装置(山下教授提供)
道のりはキビしいですが、日々チャレンジしているところです(笑)。
――抱負をお願いします。
山下さん 土木分野にはまだまだ解決すべき問題がたくさんあると思います。そういう問題をいろいろな方とお話をしながら、われわれの技術が役に立つことがあれば、それを使って現場の問題を解決していきたいと考えています。
ロボットには、人がやっていることを肩代わりするという役割のほかに、人ができないことをやるという役割もあります。
たとえば、音響カメラを用いたセンシング技術をマリコンさんと共同開発しています。音響カメラは、音を飛ばして、跳ね返ってきた音をキャッチすることで、状況を把握するモノです。普通のカメラだと、水中に入れると数m先を撮影することができませんが、音響カメラなら、それができるわけです。音のほかにも、光や温度の情報を使ったカメラもあります。
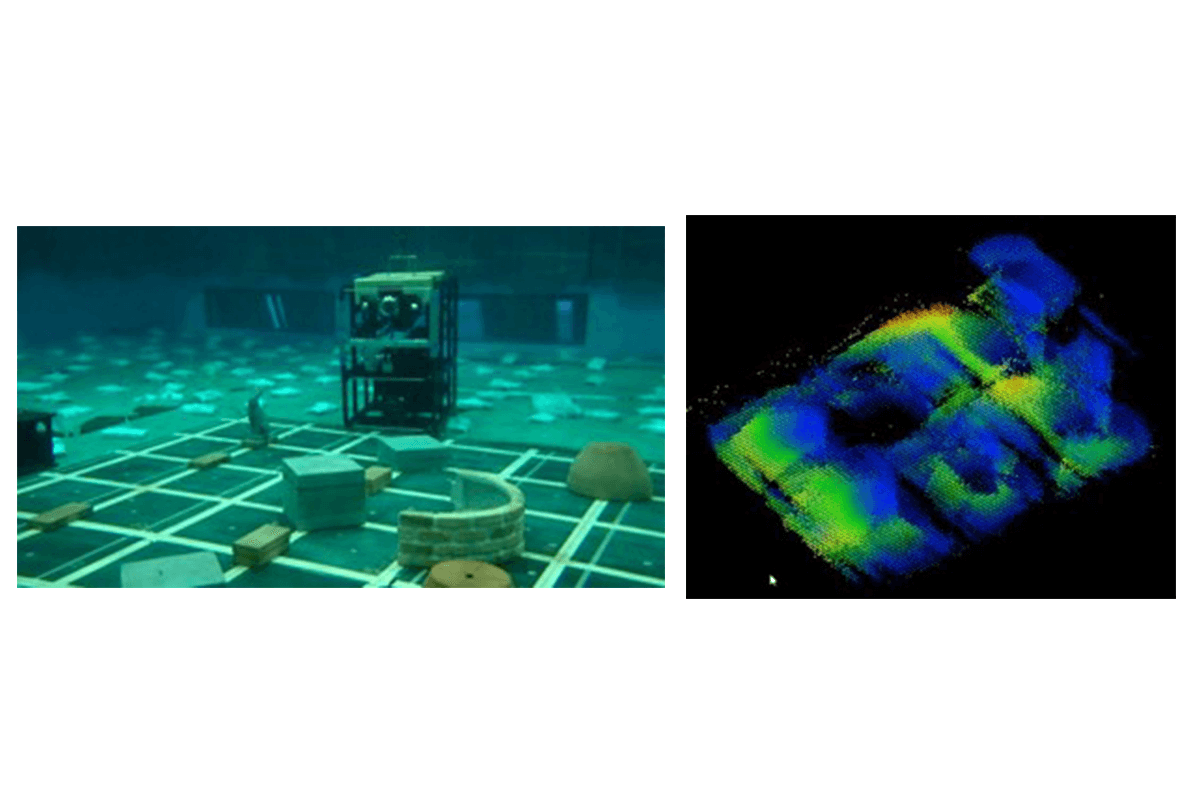
左は音響センシングのユニット、右は取得データ(山下教授提供)
こういう技術を使うことで、これまでできなかった作業ができるようになると思います。生産性向上と言われていますが、生産性を根本から変えることができると思っています。こういうことにもチャレンジしていきたいと考えています。
人材採用・企業PR・販促等を強力サポート!
「施工の神様」に取材してほしい企業・個人の方は、
こちらからお気軽にお問い合わせください。