
甲子園球場が”選奨土木遺産”に! 2024年度は歴史を彩ってきた14件の施設が認定
(公社)土木学会(佐々木葉会長)は9月24日、2024年度「土木学会選奨土木遺産」として、「阪神甲子園球場・枝川橋梁」など14件を認定し発表した。これにより、選奨土木遺産は累計531件となった。 選奨土木遺産は、工学的機...
右から、川田工業 橋梁事業部開発部 知能機械チーム担当部長 池田俊雄氏、同チームのクリシュナムラ・スバークリシュ氏、三毛タッカー・ローリー氏
建設業界は、労働者の高齢化や担い手不足、労働時間の上限規制に加え、さらには猛暑やゲリラ豪雨などによる屋外作業環境の悪化など、多数の課題を抱えている。とくに現場においては、DXと人的作業を組み合わせたハイブリッドなアプローチが急務となっている。そうした中、かねてよりロボティクス技術の現場活用について研究・開発を続けてきた川田工業が、これまで培ってきた要素技術を融合し、現場の作業環境に適したEGmobileの開発に至った。
EGmobileは、港大橋の鋼床版大規模修繕現場で2025年の猛暑中に稼働した。港大橋は、1974年に完成した大阪府大阪市港区海岸通3丁目と住之江区南港東9丁目を結ぶ全長980mの赤いトラス橋。大阪港に架かり、阪神高速道路の一部を構成している。
同現場の検査路には縦断勾配があり、さらに2mごとに高さ1.4mの梁が設置されているため、頭部をぶつけるリスクが高く、くぐる際に作業員の身体へ大きな負担がかかっている。EGmobileの活用は、こうした作業負担の大幅な軽減につながっている。

高さ1.4mの梁をくぐる様子
「今回の港大橋の補修工事では、小さな部品の取替工事が多く、より人手が必要な現場と言える。上下2車線があり、通行規制をすれば渋滞が発生し、経済損失も生じてしまう。また、車両が走行している道路の直上で作業するため、物の落下を防止しつつ工事を実施する必要がある。そこで夜間工事や交通規制の低減を目的として、資材搬送台車の開発を進めてきた」(池田氏)

港大橋の補修工事
EGmobileの寸法は、W630mm × D646mm × H500mm、本体質量は53kg(バッテリ含まず)。駆動輪にはクローラを採用しており、けん引質量(目安)は100kg(路面等の環境による)、最大速度は0.6m/sとなっている。本機の特徴は、検査路の側面に貼付した走行テープと距離を保ちながら自動走行(レーザー誘導)するほか、ラジコンによる手動操作を選択できる点だ。リモート端末での状況確認が可能で、高さ・幅・重量などの物理的制約を考慮した設計に加え、防塵防滴機能も備えている。また、クローラ駆動であるため、段差や床面の振動があっても走行が可能となっている。

走行中のEGmobile
川田工業は2020年からさまざまな技術開発に本格的に取り組んできた。開発のポイントには、「『作業をロボットやAIに変えるべきもの』と『将来にわたって人が引き継ぐもの』について適切に棲み分けを行う」こと、そして「単なる省人化や無人化ではなく、『将来の人への新しい職域創出を念頭に置く』」という2点を据えた。
2020年、この技術開発の一つとして、川田工業、川田テクノロジーズ、芝浦工業大学の3者は、建設現場のテレワーク化に向けたアバターシステムの共同開発を開始した。これは、人手による橋梁の測定業務などをリモート化し、建設現場の生産性や品質の向上とともに、労働力不足の解決を目指すものだった。
このシステムでは、移動型作業ロボットと遠隔操作端末、計測器を高速通信で連携させている。アバターロボットを現場で活用する際の技術的な課題抽出を目的に、四国地方の橋梁架設現場で検証試験を実施し、操作性を確認するため、鋼橋の現場塗装部の品質管理で行われている塗装膜厚の測定を遠隔で実施した。
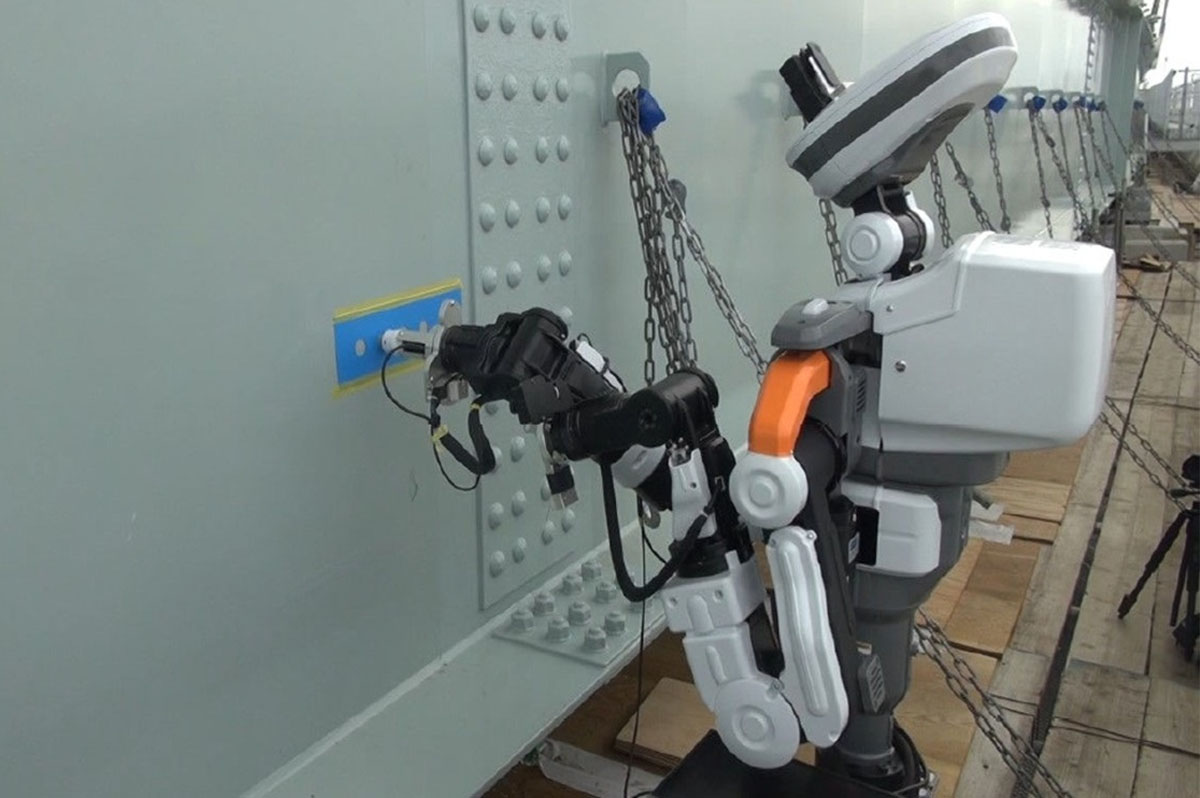
遠隔で実施した塗装膜厚測定のようす
その結果として、アバターロボットによる現場のテレワーク化を推進するためには、①通信インフラの普及、②操作性の向上、③ロボット環境の現場志向の充実など、他分野での技術開発の推進と社会情勢の変化に歩調を合わせることで課題が解決することが判明した。
「ちょうどこの頃、コロナ禍の最中で現場のテレワーク化を検討しているときにアバターロボットが生まれた。これ以降、個別の要素技術を次々と確立してきたが、この技術の『移動体』の部分に適用したのがEGmobileだ」(池田氏)




