「鉄筋の結束は、もう職人がやる仕事じゃない」 香川発の建設ロボが、鉄筋職人の汗一粒の価値を高める
ロボットで職人の汗一粒の価値を高める 地方から果敢に建設DXにチャレンジしている男がいる。建ロボテック株式会社の眞部達也社長だ。 眞部社長が開発したのは、鉄筋の協働型鉄筋結束ロボット「トモロボ」。自らが鉄筋職人出身でもあ...

山下 淳さん 東京大学大学院新領域創成科学研究科人間環境学専攻 工学部精密工学科 教授
ひょんなことから、東京大学柏キャンパスで精密工学(ロボット)を研究する山下淳さんに取材する機会を得た。山下さんは、ロボットの先生ながら、東京大学が開講しているi-Constructionシステム学寄付講座のスターティングメンバーに名を連ねている。
応用分野としての土木分野への関わりが深く、土木現場の課題解決に向けたゼネコンなどとの共同研究も多い。そんな山下さんにとって、土木現場のロボット化(機械化)の来し方行く末はどう見えているのか。最近の研究動向を踏まえつつ、話を聞いてきた。
転職で悩んでいる…。転職アドバイザーに相談してみませんか?[PR]
――ロボット工学の研究者として、土木分野にどう関わっているのか。これまでの経緯を含めて教えてください。
山下さん 私が東大の教員になったのは2011年ですが、私が興味を持って研究してきたのは、センサの情報処理とそれに基づくロボットの動作といった領域です。
2018年に社会基盤工学(土木)の小澤先生がi-Constructionシステム学寄付講座を立ち上げられました。その際、この講座は、社会基盤工学の先生だけでなく、精密工学(ロボット)の先生と一緒になってやりましょう、というお話だったので、私も参画させていただいたわけです。2022年4月から柏キャンパスに移りましたが、引き続き一緒に寄付講座をやらせてもらっています。
――山下先生が手を挙げたのですか。それとも、向こうから声がかかったのですか。
山下さん 小澤先生からお声がけいただきました。最近の土木技術では、しばしばロボット技術が活用されています。i-Constructionシステム学寄付講座は、土木プロパーとロボットプロパーが一緒になって、お互いの得意な分野を融合することで、より良いものを生み出していきましょう、という考え方で運営されていますので、それでお声がけいただいたのだと思います。
――ロボットの先生として過去に土木分野と関わることはあったのですか。
山下さん ありました。福島の原発対応のロボットの研究をやったことがあるのですが、無人でガレキを撤去するといったノウハウは、雲仙普賢岳の無人化施工がもとになっています。なので、原発対応ロボットの研究は、無人化施工のノウハウを持つゼネコンの方と共同に取り組みました。
一般には、ロボットと聞くと、工場など建物の中で部品を組み立てるイメージがあると思うのですが、建物の外で活躍しているロボットもあって、それが土木分野のロボットです。スゴく強いチカラが必要だったり、無人で作業する必要があったりする部分にロボットが使われているわけです。そういう感じで、外で働くロボットの研究をしていると、自然にゼネコンの方と一緒にお仕事をさせていただくことが多かったです。
たとえば、福島原発のガレキを撤去する際に、建設機械のウデが大きすぎて、ガレキが見えないという問題がありました。そこで、われわれのセンシング技術を使って、ウデを半透明にして、オペレーターの方が遠隔でも操作できるようにしました。
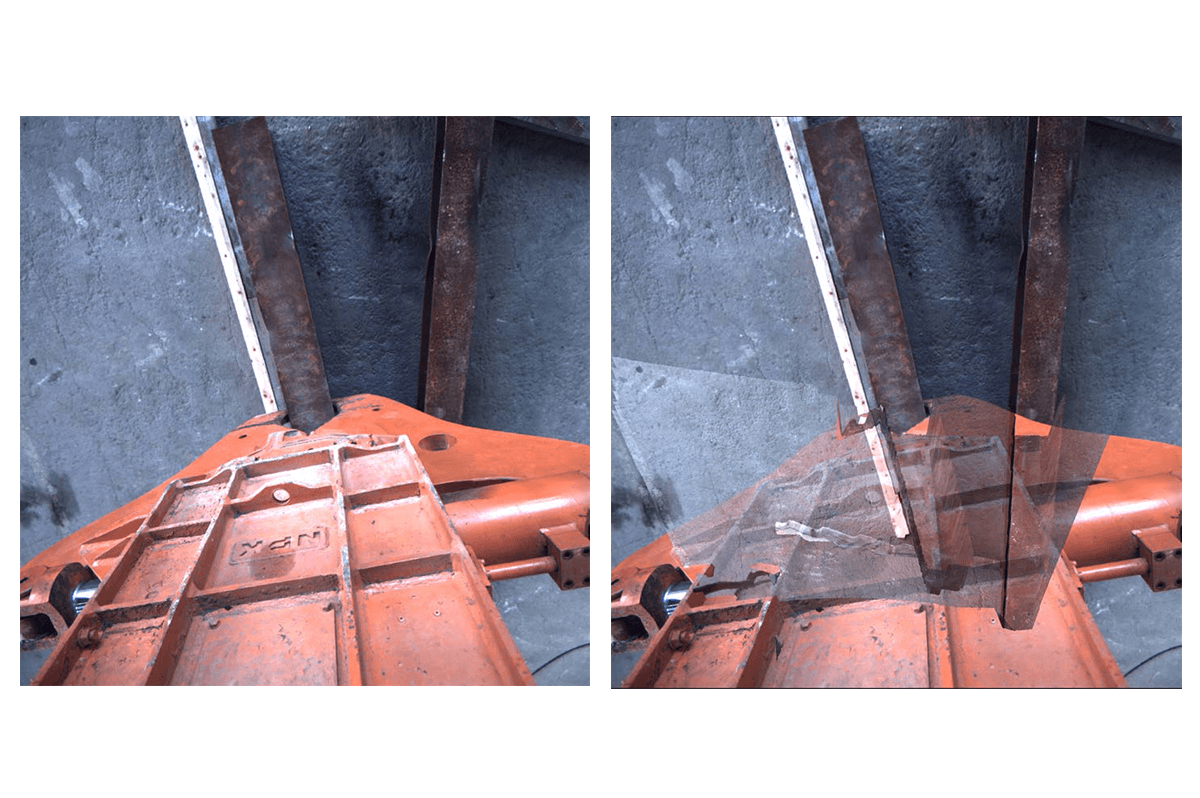
左がオリジナル画像、右が半透明処理後画像(山下教授提供)
建機メーカーさんと共同して、建設機械に複数台カメラを付けることで、俯瞰する視点から見たような映像をリアルタイムで撮影するシステムをつくりました。自動車のアラウンドモニターのようなものですが、こちらが2次元なのに対し、われわれのシステムは3次元なので、見たい角度で自由に見れるのが特長です。
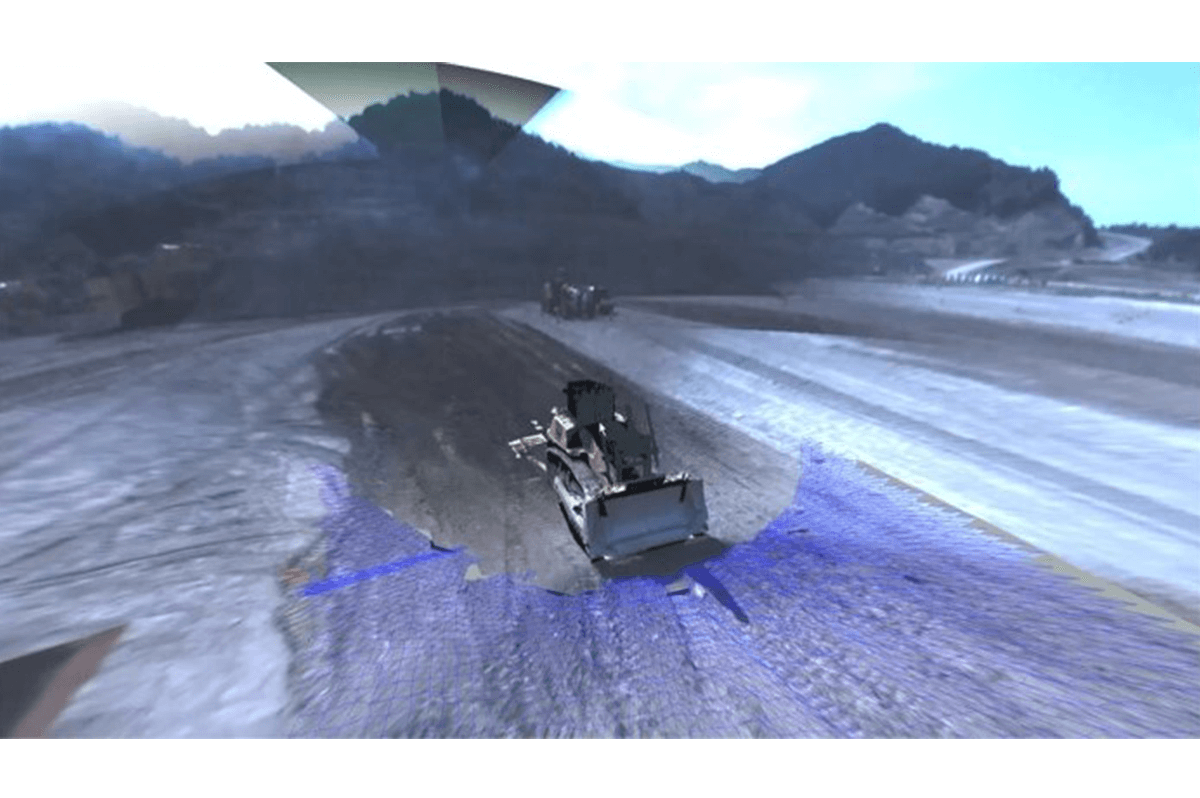
3次元の俯瞰視点画像(山下教授提供)
あとは、SIPというインフラを維持管理する国のプロジェクトがあるのですが、このプロジェクトの一環として、トンネル内の打音検査をロボット化するということもやりましたし、橋梁を点検するためのドローンを開発したりしました。
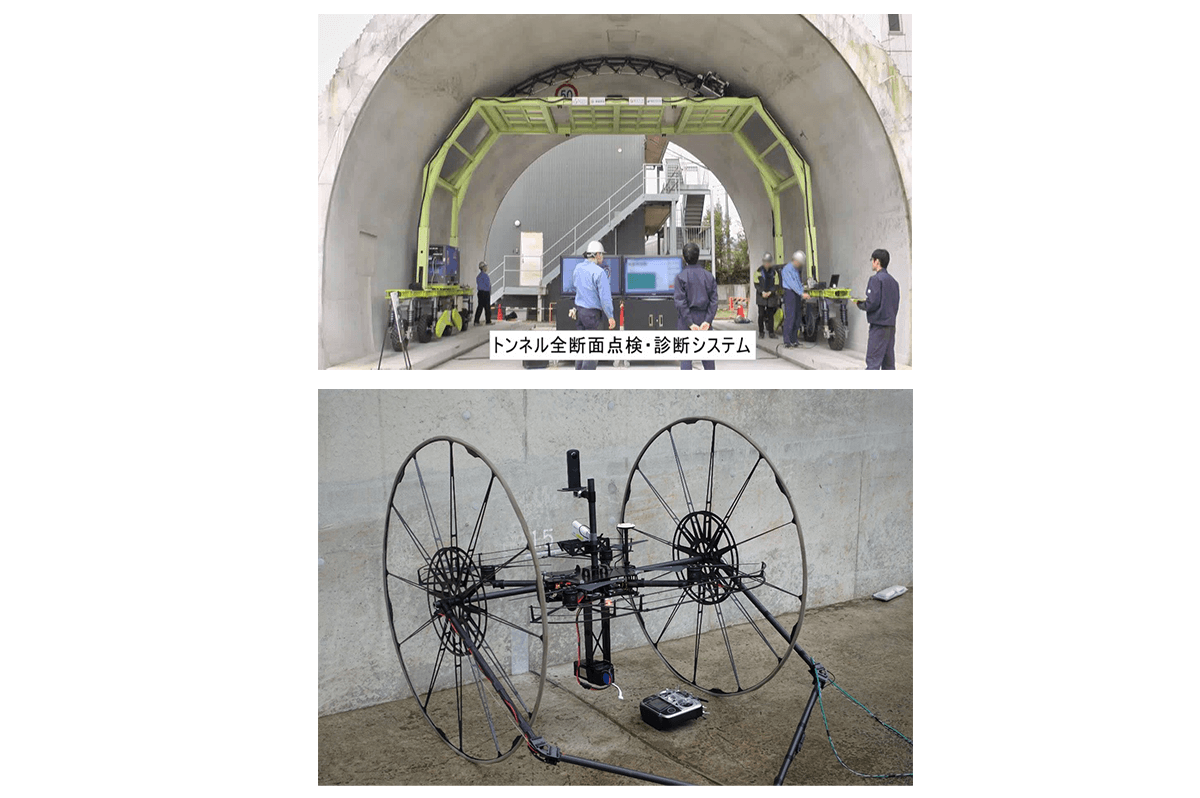
ロボット化されたトンネル内打音検査システムとドローン(山下教授提供)
そういう実績もあったので、i-Constructionシステム学寄付講座にお声がけいただいたのだと思います。